控制系統(tǒng)工程師(自適應(yīng)光學(xué)方向)崗位要求
一���、核心職責(zé)
1. 實(shí)時(shí)控制系統(tǒng)架構(gòu)設(shè)計(jì)
– 設(shè)計(jì)低延遲(<500μs)閉環(huán)控制系統(tǒng)架構(gòu)
– 開發(fā)多速率控制策略(傳感器1kHz/校正器2kHz)
– 實(shí)現(xiàn)系統(tǒng)狀態(tài)監(jiān)控與故障保護(hù)機(jī)制
2. 控制算法開發(fā)與優(yōu)化
– 實(shí)現(xiàn)經(jīng)典控制算法(PID��、LQG)
– 開發(fā)自適應(yīng)控制算法(模型預(yù)測控制���、魯棒控制)
– 優(yōu)化算法實(shí)時(shí)性能(計(jì)算延遲<100μs)
3. 硬件系統(tǒng)集成
– 設(shè)計(jì)高速數(shù)據(jù)接口(FPGA+DSP架構(gòu))
– 開發(fā)變形鏡驅(qū)動(dòng)電路控制模塊
– 實(shí)現(xiàn)傳感器-控制器-執(zhí)行器同步
4. 系統(tǒng)性能測試
– 建立控制帶寬測試方案(-3dB帶寬>200Hz)
– 開發(fā)系統(tǒng)穩(wěn)定性分析工具(Nyquist/Bode分析)
二、專業(yè)技能要求
1. 控制理論基礎(chǔ)
– 精通現(xiàn)代控制理論(狀態(tài)空間�、最優(yōu)控制)
– 熟悉頻域分析方法和穩(wěn)定性判據(jù)
– 掌握系統(tǒng)辨識(shí)技術(shù)
2. 實(shí)時(shí)系統(tǒng)開發(fā)
– 精通實(shí)時(shí)操作系統(tǒng)(VxWorks���、RT-Linux)
– 熟悉FPGA開發(fā)(Verilog/VHDL)
– 掌握DSP編程(TI C6000系列)
3. 編程能力
– 熟練使用MATLAB/Simulink進(jìn)行控制算法仿真
– 精通C/C++實(shí)時(shí)編程
– 掌握Python數(shù)據(jù)分析工具
4. 硬件接口
– 熟悉高速數(shù)據(jù)通信(PCIe���、EtherCAT)
– 了解模擬/數(shù)字信號(hào)調(diào)理電路
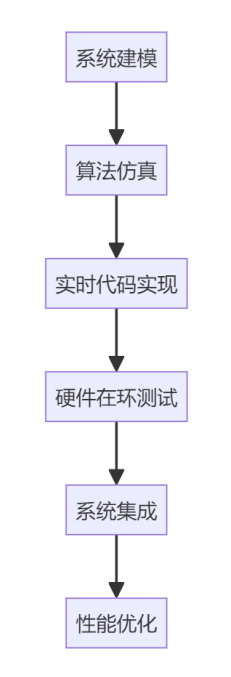
三��、典型開發(fā)流程
四����、關(guān)鍵技術(shù)指標(biāo)
1. 控制延遲:<200μs
2. 閉環(huán)帶寬:>300Hz
3. 校正精度:λ/20 RMS
4. 系統(tǒng)穩(wěn)定性:相位裕度>45°
五�、行業(yè)應(yīng)用方向
1. 天文望遠(yuǎn)鏡
– 開發(fā)極弱光條件下的自適應(yīng)控制系統(tǒng)
– 實(shí)現(xiàn)多層共軛自適應(yīng)光學(xué)控制
2. 激光武器系統(tǒng)
– 設(shè)計(jì)高功率激光光束穩(wěn)定系統(tǒng)
– 開發(fā)抗干擾控制算法
3. 視網(wǎng)膜成像
– 實(shí)現(xiàn)人眼像差快速補(bǔ)償
– 開發(fā)眼科診療設(shè)備控制系統(tǒng)
六、優(yōu)先考慮條件
• 有自適應(yīng)光學(xué)控制系統(tǒng)開發(fā)經(jīng)驗(yàn)
• 熟悉實(shí)時(shí)以太網(wǎng)協(xié)議(EtherCAT����、PROFINET)
• 掌握機(jī)器學(xué)習(xí)在控制中的應(yīng)用
• 發(fā)表過控制算法相關(guān)論文/專利
七、團(tuán)隊(duì)協(xié)作要求
• 與光學(xué)團(tuán)隊(duì)確定系統(tǒng)性能指標(biāo)
• 配合算法團(tuán)隊(duì)優(yōu)化控制參數(shù)
• 協(xié)助硬件團(tuán)隊(duì)設(shè)計(jì)專用控制板卡
注:現(xiàn)代自適應(yīng)光學(xué)控制系統(tǒng)正向更高帶寬(>1kHz)����、更智能控制(AI算法)方向發(fā)展。工程師需在保證實(shí)時(shí)性的同時(shí)����,不斷提升系統(tǒng)抗干擾能力和控制精度。