軟件與算法工程師(自適應光學方向)崗位要求
自適應光學(AO)系統(tǒng)的軟件與算法開發(fā)是實現(xiàn)高精度波前實時校正的核心�,要求工程師具備高性能計算�����、控制算法優(yōu)化和系統(tǒng)集成能力�。以下是該崗位的詳細要求:
一、核心職責
1. 波前處理算法開發(fā)
– 設計實時波前重構算法(如Zernike多項式擬合�、最小二乘法),優(yōu)化計算效率(延遲<1ms)��。
– 開發(fā)基于深度學習的波前預測模型(如CNN��、LSTM)���,提升湍流擾動補償能力��。
2. 控制系統(tǒng)軟件開發(fā)
– 實現(xiàn)閉環(huán)控制算法(PID�����、自適應控制��、最優(yōu)控制)�,確保系統(tǒng)穩(wěn)定性與帶寬(通常100Hz~1kHz)。
– 開發(fā)多線程/GPU加速計算模塊��,滿足實時性要求(如千赫茲級波前校正)�。
3. AO系統(tǒng)軟件架構設計
– 構建模塊化軟件框架,集成波前傳感��、校正控制�����、數(shù)據(jù)存儲等功能�����。
– 設計人機交互界面(GUI)��,支持參數(shù)配置�、實時監(jiān)控與數(shù)據(jù)分析��。
4. 硬件接口與系統(tǒng)集成
– 開發(fā)高速相機、變形鏡驅動器���、FPGA等硬件的通信接口(如Camera Link�����、PCIe�����、千兆以太網(wǎng))���。
– 優(yōu)化數(shù)據(jù)傳輸流程,降低系統(tǒng)延遲(如DMA直接內存訪問)��。
5. 性能優(yōu)化與測試
– 分析系統(tǒng)瓶頸(如計算延遲����、內存占用),進行代碼級優(yōu)化(CUDA�、SIMD指令集)。
– 設計自動化測試工具��,驗證算法精度(如殘差波前RMS誤差評估)���。
二��、專業(yè)技能要求
1. 編程與算法能力
• 語言與工具:
– 精通C++(實時系統(tǒng)開發(fā))���、Python(算法原型設計)�。
– 熟悉CUDA/OpenCL并行計算�����,優(yōu)化矩陣運算(如SVD��、共軛梯度法)���。
• 算法基礎:
– 掌握數(shù)值分析(線性代數(shù)��、最優(yōu)化理論)�����、信號處理(FFT�����、濾波)�����。
– 了解機器學習(監(jiān)督/強化學習)在AO中的應用(如湍流預測)�。
2. 實時系統(tǒng)開發(fā)
• 熟悉Linux實時內核(Xenomai�、RT-Preempt)或Windows實時擴展(RTX64)。
• 掌握多線程/進程同步技術(如線程池�、無鎖隊列)。
3. 硬件協(xié)同開發(fā)
• 具備FPGA(Verilog/VHDL)或DSP(TI C6000系列)基礎���,理解硬件加速邏輯���。
• 熟悉高速數(shù)據(jù)采集(如Camera Link、CoaXPress)與低延遲通信協(xié)議(UDP/RDMA)�。
4. 跨學科知識
• 基礎光學概念(波前像差、Strehl比)��。
• 了解控制理論(狀態(tài)空間模型����、頻域分析)。
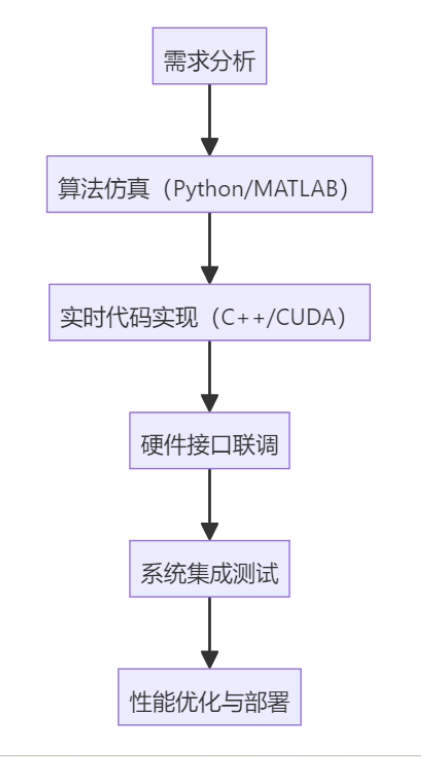
三�、典型開發(fā)流程
四、行業(yè)應用與案例
1. 天文望遠鏡AO系統(tǒng)
– 開發(fā)多導星融合算法����,提升大視場校正能力(如歐洲ELT的MCAO系統(tǒng))���。
– 案例:Keck望遠鏡的實時控制軟件(KAPA),延遲<500μs����。
2. 激光通信終端
– 設計抗湍流光束控制算法,實現(xiàn)星地激光鏈路穩(wěn)定跟蹤����。
3. 眼科成像設備
– 開發(fā)人眼像差動態(tài)補償算法,用于視網(wǎng)膜高分辨率OCT成像���。
五�、團隊協(xié)作要求
• 與光學團隊共同定義波前傳感器數(shù)據(jù)處理流程(如子孔徑劃分策略)�。
• 配合電子工程師優(yōu)化FPGA算法加速(如波前斜率計算IP核)。
六�、優(yōu)先考慮條件
• 有自適應光學、機器人控制或計算機視覺項目經(jīng)驗��。
• 熟悉ROS/LCM等中間件在分布式系統(tǒng)中的應用���。
總結
軟件與算法工程師是AO系統(tǒng)的”智能中樞”����,需兼具算法創(chuàng)新�、高性能編程、硬件協(xié)同能力����。團隊中需緊密對接光學與電子模塊,通過算法提升校正精度����,通過軟件優(yōu)化釋放硬件潛力,最終實現(xiàn)微秒級實時波前控制�����。